Chapter 8. Signing space
The signing space refers to the three-dimensional area where the signs are articulated. Generally, it is considered to be restricted to the area in front of the signer’s torso. In the horizontal plane, this area usually extends from elbow to elbow.
The signing space has a crucial role in LIS, fulfilling several grammatical functions. The current chapter outlines the features and functions of the signing space in LIS. An important distinction relates to the use of the signing space, which can be abstract (PRAGMATICS 8.1.1) or topographic (PRAGMATICS 8.1.2). Temporal information may also be conveyed through a metaphorical use of the signing space (PRAGMATICS 8.2.). Moreover, it is possible to associate the signing space with the signer’s perspective in describing events and situations (PRAGMATICS 8.3).
8.1. Uses of signing space
The signing space is not only used for articulating signs, but it can also bear meaning itself. It is possible to distinguish two different uses of the signing space. The first one is the abstract use, which conveys syntactic information and abstract references (PRAGMATICS 8.1.1.). The second one is the topographic use of the signing space, which encodes the spatial distribution of the described referents (PRAGMATICS 8.1.2.).
8.1.1. Abstract use
The picture below shows a commonly abstract use of the signing space area.

Figure: Abstract representation of the signing space (recreated from Bertone, 2011: 120)
The black dots named A, B and C represent the articulation points in space. In particular, the location A is characterised by the [+ proximal] feature and indicates a position closer to the signer or the signer himself/herself (for this reason it also specifies the first person). The location B is characterised by the [- proximal] feature and refers to the interlocutor’s position, identifying the second person. The location C is characterised by the [+ distal] feature and relates to a position far away both from the signer and the interlocutor, thus indicating the third person. The remaining locations of the signing space, which are not associated with any referent, represent neutral and undetermined points.
The abstract use of the signing space fulfils morphological and syntactic functions, realising referent-location associations and verb agreement. According to this type of use, locations in the signing space are arbitrarily chosen in order to set discourse referents and realise the arguments of the verbs (PRAGMATICS 1.1). The establishment of a locus in space does not convey any specific semantic meaning, neither it affects the truth condition of the sentence. It means that the spatial loci can be moved in space, and these changes do not determine any consequence in the meaning of the sentence. This phenomenon is shown in the two sentences below.
a. man ixb woman ixa book 3bCL(flat open 5): ‘give_book’3a
‘The man gives the book to the woman.’
b. man ixa woman ixb book 3bCL(flat open 5): ‘give_book’3a
‘The man gives the book to the woman.’
Crucially, the meaning of the two examples above is the same. The exact point in space in which the discourse referents (‘man’ and ‘woman’) are localised is not relevant, as long as the verb is directed from the location associated with the subject (man) to the location associated with the indirect object (woman).
Although these locations are interchangeable, LIS seems to have a preference in setting the subject and the object position. The subject is generally localised on the ipsilateral side of the signer, while the object is localised on the contralateral side of the signer. Ipsilateral refers to the area closer to the side of the dominant hand, while contralateral corresponds to the area more distant from the side of the dominant hand, considering the horizontal axis, as shown in the picture below.

Figure: Mapping of syntactic structures onto spatial positions (recreated from Geraci, 2014: 125)
Localising an entity in the signing space also allows to anaphorically refer back to the same entity within a discourse. In these cases, spatial location is called referential locus (or R-locus) and fulfils the anaphoric function of reference-tracking (PRAGMATICS 2). The reference occurs via a first introduction of the entity in the discourse and its association with a referential locus in space. The chosen location may be used by the signer to mention that entity again in the discourse. This strategy allows the interlocutor to retrieve an entity which was previous located in the same point in space. The retrievability is favoured by manual and non-manual cues pointing to the spatial location where the entity was located. The sentences below, (a) and (b), show how it is possible to refer back to a previously introduced referent. Specifically, in sentence (a) the strategy used to favour retrievability is manual, i.e. a pronoun realised by pointing the extended finger toward the relevant R-locus (LEXICON 3.7). Sentence (b) shows an example of non-manual referring-back strategy, which occurs via eye gaze (eg) pointing toward the relevant R-locus.
a. dog ix(dem)a hunger strong. man CL(G): ‘walk’. ix3a CL(F): ‘eyes_move’ go_away sad
‘The dog is starving. A man walks by. He (the dog) follows him with his eyes, but the man goes away, and the dog is sad.’
eg: a eg: a
-
b.woman beautiful-int CL(G): ‘walk’a ix1 look_at like ix1
‘A very beautiful woman is walking by. I look at her, I like her!’
The same syntactic function of the signing space is conveyed through the use of possessive pronouns (LEXICON 3.7.3). In such case, the use of the signing space results distinctive in unambiguously referring to a specific entity. In the example below, the possessive pronoun is directed to the R-locus where gianni was previously signed, and it unambiguously expresses co-reference. This sign indicates that the cat can belongs to Gianni (not to Mario) because of the specific use of the signing space.
giannia know ixb mariob ixb cat poss3a like ix3a
‘Gianni knows that Mario loves his cat.’
LIS also seems to account for the increasingly larger amount of entities through the increasingly higher use of space. Therefore, a little amount of people indicated by the articulation of a predicative classifier ‘all go’ is generally located in the lower part of the frontal plane within the signing space. This is shown in the example below, where the predicate classifier ‘all go’ refers to the family.
park pe yesterday ix1 ix1pl family CL(spread curved open 5): ‘group_move’
CL(5): ‘all_go’
‘Yesterday all my family went to the park.’
On the contrary, a big amount of people, like a crowd in a demonstration, is referred to through the articulation of the same predicative classifier ‘all go’, but this time realised in the upper part of the frontal plane of the signing space. This is shown in the example below.
one^year^last park person++ protest CL(5): ‘all_go’
‘Last year, lots of people went to the park to protest.’
8.1.2. Topographic use
A different use of space is the topographic use which expresses spatial relations among entities and conveys specific meanings through the different locations of the signing space. Such meaningful descriptions expressed by loci are possible because of the iconic properties of the visual-spatial channel. Topographic use of space bears a semantic value because a modification in the locus corresponds to a different truth condition of the sentence. This can be seen in the two examples below in which two distinct locations provide different meanings.
a. treea SASS(5): ‘tall_round’ bird fly CL(curved open V): ‘fly_on_top_of_a’
‘A bird flew to the top of a tree.’
b. treea SASS: ‘tall_round’ bird fly CL(curved open V): ‘fly_on_bottom_of_a’
‘A bird flew to the bottom of a tree.’
Such spatial information is mostly conveyed through classifier constructions. As shown in the examples above, the predicative classifier referring to the bird is used to place the referent on the top or on the bottom of a tree.
If more than one referent is present in space, LIS signers usually introduce background entities first and then the entity which is under the focus of attention. The background elements are called ground, and the central element is called figure. The spatial relationship among these entities is expressed through the specific location of the classifiers in the space. The simultaneous description of several elements is licensed by the possibility for a signer to use both manual articulators. Such case is shown below.
dom: boss ixa CL(V): ‘walk_to_b’ CL(V): ‘fall_at_b’--------------
n-dom: CL(V): ‘fall_at_b’ dog come
dom: CL(V): ‘fall_at_b’----------------------
n-dom: CL(curved open V): ‘jump_on_b’++
‘The boss was walking when he fell on the ground, then the dog came and jumped on him several times.’
Topographic entities of the real world are mapped into the signing space in two main contexts. The first one concerns geographic information and the second one is related to the description of the physical environment.
As for geographic information, cities and countries are mapped into the frontal plane of the signing space, as representing an imaginary map in front of the signer. In such way, northern areas are realised in the upper part of the signing space, southern areas in the lower part, western areas on the left side of the signing space, and eastern areas on the right side.

Figure: Topographic use of the frontal plane in LIS: north vs. south

Figure: Topographic use of the frontal plane in LIS: west vs. east
As for the description of the physical environments, such as rooms, shops, or building interiors, the imaginary map is mapped into the horizontal plane of the signer, as shown in the picture below.

Figure: Topographic use of the horizontal plane in LIS
Another iconic use of the frontal plane involves social distinctions. In this regard, hierarchical relations are iconically represented in the signing space: higher social positions are generally mapped into the upper part of the frontal plane, while lower social positions are represented in the lower part of the frontal plane. In family relations, the upper part is usually associated with older family members, the lower part with younger ones. As a consequence, several asymmetrical relations can be mapped into the frontal plane, such as parent - child, boss - worker, and teacher - student (PRAGMATICS 9). To illustrate, we show in the video below the relation between a grandfather (localised higher in space) and his grandson (localised lower in space).
pietro ixa grandfather ix[up] ix[down] grandson ix3a
‘Pietro is the grandfather’s grandson.’
The main differences between the two types of spatial uses, abstract and topographic, concern the conceptualisation of the points in the signing space. The abstract use establishes a formal and arbitrary relationship between the referent and the corresponding location, on the contrary, the topographic use establishes an iconic or symbolic relationship between the referent and the corresponding location in the signing space. Furthermore, the abstract use of space is composed of fixed trajectories within each spatial plane, while the topographic use exploits a larger and freer range of spatial positions. Both these uses should not be conceived as mutually exclusive, but they may co-exist in the same signing production. For instance, consider a context in which a woman and a man are mentioned. They are produced in two different areas of the signing space: woman on the right and man on the left.
woman ixa go_out stroll CL(V): ‘walk’, ixb man drunk car
CL(curved open V): ‘get_in_the_car’.
dom: CL(unspread 5): ‘car_move’b CL(unspread 5): ‘car_crash’b
n-dom: CL(V): ‘person_walk’a CL(V): ‘person_crash’b
‘A woman went out for a stroll. A drunken man got in his car. The man was driving dangerously, the woman was walking, and then he hit the woman.’
The last classifier predicates in the example above MORPHOLOGY 5) employ both the abstract and the topographic space.
The anaphoric use of the signing space can be observed in the classifier predicate CL(V): ‘person_walk’ which anaphorically refers back to an entity mentioned in the previous sentence, the walking woman. The topographic use of the signing space is fulfilled by the iconic position of the woman represented with respect to the car’s position.
8.2. Temporal expressions
The signing space is also used to convey temporal information at both lexical and discourse level. Such information is realised through an imaginary time line perpendicular to the signer’s body. At the lexical level, temporal information is expressed by adverbials, such as yesterday and then, and other signs referring to time, such as three^year^last and tuesday^next. All these signs conform to the time line strategy. Time lines are relevant to the discourse level as well, since different events can be spatially projected to different points of the time line.
Three types of time lines are distinguishable in LIS: a basic time line, a sequence time line, and an anaphoric time line. The former is set perpendicularly to the signer’s body and extends forward from his dominant shoulder, as shown in the picture below.
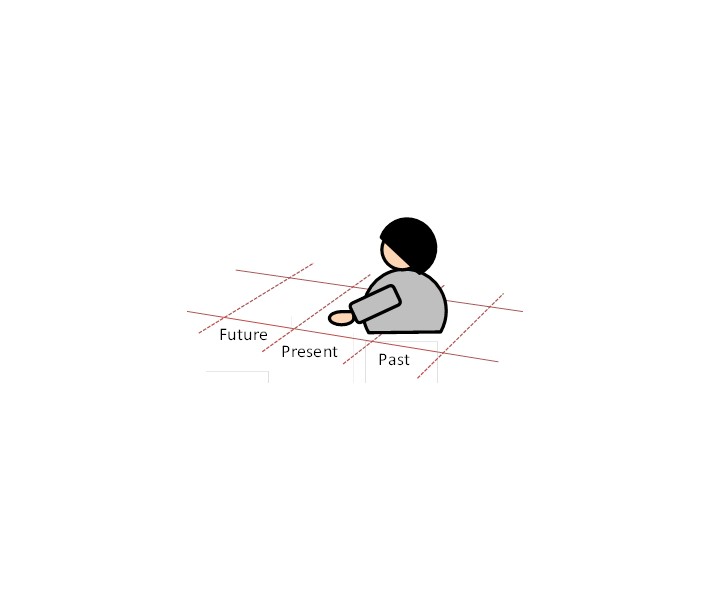
Figure: The deictic time line in LIS
The default use of the basic time-line is deictic, namely it refers to the time of the utterance. The temporal description involves a symbolic use of the signing space; according to this strategy, time information referring to the past is signed over the signer’s dominant shoulder, present information is signed right in front of the signer’s torso and the future is realised in the area further away. The example below shows the use of the basic time line.
university ix1 start three^year^last
‘I started the university three years ago.’
The sequence time line is parallel to the signer’s shoulders and extends from left to the right on the horizontal plane. It represents early to later periods or moments in time.

Figure: The sequence time line in LIS
In the sequence time line, hours, days, weeks, months, years, seasons, and general periods of time may be articulated. The example below shows such use.
monday until friday ix1 work++
‘From Monday to Friday I work continuously.’
Another strategy to indicate hourly sequences is to place hours around an imaginary clock in the vertical plane in front of the signer’s body, as shown in the example below.
school ix1 stay at_eight[contra] at_nine[contra_up] at_ten[up] until at_two[ipsi] go_out
‘I remain at school at eight, at nine, at ten… until two, when I go out’.
The anaphoric time line follows an imaginary diagonal trajectory. Anaphoric temporal references are determined within the discourse and are expressed with respect to a point of reference marked along this line. In the sentence below, the point of reference is represented by the birth of the signer’s nephew, which is signed close to the signer’s body on the ipsilateral side. The move to Bologna realises a relation of posteriority and is expressed farther from the signer’s body on the contralateral side.
nephew be_born ix1 bologna move
‘After my nephew was born, I moved to Bologna’.
8.3. Perspective
Events in LIS can be represented by a specific perspective, depending on the way the referents are localised in the signing space. Two main types of perspective representations exist: the observer perspective, where the signer assumes an external point of view, and the character perspective, where the signer takes on an internal point of view. In the first case, the signer presents a description of the whole event mapping the entities in a reduced size onto the space in front of the signer’s body. In this case, the entity classifiers (MORPHOLOGY 5.1.) are the mostly used strategy for reproducing the event. The observer perspective is shown in the example below.
france ix(loc) protest CL(4): ‘people_in_parade’ CL(5): ‘crowd_be_located’
‘In France, many people are protesting in a parade.’
Differently, in the case of the character perspective, the signer represents the event by assuming the role of an entity involved in the event (PRAGMATICS 6). In such case, the integral perspective is mostly represented through the use of handle classifiers (MORPHOLOGY 5.1.1). As shown in the example below.
rs: father
father poss1 bowla soupa CL(closed G): ‘handle_spoon’ delicious
‘My father was eating a soup with a spoon and said that it was good.’
Another way to encode spatial relationships between referents is the frame of reference systems. These systems are distinguishable into two different types. The first one is the relative frame of reference and it describes spatial relationships between ground and figure by assuming the signer’s perspective. In this case, the signer places the entities in space assuming as reference point his perspective, as shown in the sentence below.
tree CL(5): ‘be_at’[right] house CL(spread curved open 5): ‘be_at’[left]
‘The house is to the left of the tree’.
The second system is the absolute frame of reference, which is not based on the relative positions of the entities, but on conventional and absolute referring points, such as cardinal directions or real geographical locations. The following sentence shows this case.
wh
dome milan CL(spread curved open 5): ‘be_at’ direction which direction
o-v-e-s-t
‘The front of the dome of Milan is directed toward the West.’
It is likely that a relative frame of reference occurs together with an external perspective, namely the observer perspective. On the contrary, the absolute frame of reference is mostly found with a personal point of view, that is the character’s perspective.
Information on Data and Consultants
The descriptions in these sections are based on the references below and on grammatical judgments. For information on data and consultants see the references. The video clips and images exemplifying the linguistic data have been produced by a LIS native signer coming from the northern part of Italy and involved in the SIGN-HUB Project.
Authorship Information
Chiara Calderone
References
Amorini, Giuseppe & Luigi Lerose. 2012. Studi linguistici in Lingua dei Segni Italiana (LIS) – Analisi fonologica e le funzioni deittiche ed avverbiali, e aspetti metaforici in parametri formazionali. Klagenfurt: Alpen-Adria-Universität, PhD dissertation. (300-325)
Bertone, Carmela. 2007. La Struttura del Sintagma Determinante nella LIS. Venice: Università Ca’ Foscari, PhD dissertation.
Bertone, Carmela. 2011. Fondamenti di grammatica della lingua dei segni italiana. Milano: Franco Angeli. (38), (119-122) [8.1]
Brunelli, Michele. 2011. Antisymmetry and Sign Languages. A Comparison between NGT and LIS. Utrecht: LOT.
Geraci, Carlo. 2014. Spatial syntax in your hands. In J. Iyer & L. Kusmer (eds.), NELS 44: Proceedings of the Forty-Fourth Annual Meeting of the North East Linguistic Society, Volume 1, 123–134. Amherst: GLSA. (124-125) [8.1.1]
Mantovan, Lara. 2015. Nominal modification in Italian sign language (LIS). Venezia: Università Ca’ Foscari, PhD dissertation.
Mantovan, Lara. 2017. Nominal modification in Italian Sign Language (LIS). Berlin: De Gruyter Mouton.
Pizzuto, Elena. 2007. Deixis, anaphora and person reference in signed languages. In: E. Pizzuto, P. Pietrandrea & R. Simone (eds.), Verbal and Signed Languages: comparing structures, constructs and methodologies, 275-308. Berlin: De Gruyter Mouton.